Chapitre 13 : Espaces vectoriels
Questions de cours
I. Espaces vectoriels, sous-espaces vectoriels.
1. Donner la définition d'un $K$-espace vectoriel.
Définition :
On appelle espace vectoriel sur $K$ ou $K$-espace vectoriel un triplet $(E,+,\bullet)$ où $E$ est un ensemble et $+$ et $\bullet$ sont des lois tq :1. $(E,+)$ est un groupe abélien (addition des vecteurs)
2. $\bullet$ est une loi externe
$\begin{array}{lccll} \text{i.e. }\bullet : & K\times E & \to & E & \text{qui vérifie 4 points : }\forall (\lambda, \mu, x, y)\in K\times K\times E\times E\\ & (\lambda, x) & \mapsto & \lambda \bullet x \end{array}$
a. $\lambda(x+y) = \lambda x + \lambda y$
b. $(\lambda + \mu)x = \lambda x + \mu x$
c. $\lambda(\mu x) = (\lambda\mu)x$
d. $1_K x = x$ où $1_K$ est l'unité du corps $(K,+,\times)$
2. Qu'est ce qu'une combinaison linéaire de 2 vecteurs ? de $n$ vecteurs ?
Définition : Combinaison linéaire
Soient $E$ un $K$-espace vectoriel et $x_1, ..., x_n$ des vecteurs de $E$ ($n\in\mathbb{N}^*$).On appelle combinaison linéaire de ces vecteur tout vecteur $x$ de la forme : $x = \lambda_1 x_1 + ... + \lambda_n x_n$ où $\lambda_1, ..., \lambda_n$ sont dans $K$.
3. Donner 4 exemples fondamentaux d'espaces vectoriels.
1. $\mathbb{R}^n, \mathbb{C}^n,..., K^n$
2. Les fonctions à valeurs scalaire $\mathcal{F}(X,K)$
3. Les suites $\mathcal{F}(\mathbb{N},K)$
4. Les polynômes $K[X]$
2. Les fonctions à valeurs scalaire $\mathcal{F}(X,K)$
3. Les suites $\mathcal{F}(\mathbb{N},K)$
4. Les polynômes $K[X]$
4. Donner la définition d'un sous-espace vectoriel.
Définition : Sous-espace vectoriel
Soient $E$ un $K$-espace-vectoriel et $F\subset E$ une partie de $E$.On dit que $F$ est un sous-espace vectoriel de $E$ lorsque :
1. $0_E\in F$ ($F$ contient le vecteur nul)
2. $F$ est stable par combinaison linéaire i.e. $\forall (x,y)\in F^2, \forall(\lambda,\mu)\in K^2, \lambda x + \mu y \in F$
5. Donner 3 définitions équivalentes du sous-espace vectoriel engendré par une partie.
Définition :
Soient $E$ un $k$-espace vectoriel et $A\subset E$ une partie de E (pas forcement un sous-espace vectoriel)On appelle sous-espace vectoriel engendré par $A$ l'intersection de tous les sous-espaces vectoriels qui contiennent $A$. On le note $\text{vect}(A)$
Théorème : 2 caractérisation de $\text{vect}(A)$
1. $\text{vect}(A)$ est le plus petit sous-espace vectoriel de $E$ contenant $A$ au sens de l'inclusion : si $F$ est un sous-espace vectoriel de $E$ contenant $A$, alors $F$ contenant $\text{vect}(A)$.2. $\text{vect}(A)$ est l'ensemble des combinaisons linéaires que l'on peut faire avec des éléments de $A$ (si $A\neq \emptyset$)
6. SAVOIR REFAIRE : Soient $F$ et $G$ des sous-espaces vectoriels de l'espace vectoriel $E$. A quelle condition $F\cup G$ est-il un sous-espace vectoriel de $E$ ?
Preuve :
Supposons que $F\subset G$Alors $F\cup G = G$ est un sous-espace vectoriel
Idem si $G \subset F$
Réciproquement, on suppose que $F\cup G$ est un sous-espace vectoriel de $E$.
On suppose que $F\not\subset G$. Montrons que $G\subset F$.
Soit $x\in G$, montrons que $x\in F$
$F\not\subset G$, d'où $x_0\in F$ tq $x_0\notin G$
$x$ et $x_0$ sont dans $F\cup G$
or $F\cup G$ est un sous-espace vectoriel par hypothèse
donc la somme $x+x_0\in F\cup G$
Donc $x+x_0\in F$ ou $x+x_0\in G$
$1^{\text{er}}$ cas : supposons que $x+x_0\in F$
Or $x = (x+x_0)-x_0$
donc $x\in F$ car $F$ est un sous-espace vectoriel de $E$ donc stable par combinaison linéaire.
$2^{\text{nd}}$ cas : supposons que $x+x_0\in G$
Or $x_0 = (x_0+x)-x$
donc $x_0\in G$ car $G$ est un sous-espace vectoriel de $E$ donc stable par combinaison linéaire.
Or $x_0\notin G$ par hypothèse. Donc le $2^{\text{nd}}$ cas est impossible.
Ainsi $x\in F$ d'où le résultat ($G\subset F$)
7. SAVOIR REFAIRE : Soient $F$ et $G$ des sous-espaces vectoriels de l'espace vectoriel $E$. Prouver que $F+G = \text{vect}(F\cup G)$
Théorème :
1. $F+G$ est un sous-espace vectoriel de $E$.2. $F+G = \text{vect}(F\cup G)$
Preuve :
1. Montrons que $F+G$ est un sous-espace vectoriel de $E$.$0_E = 0_E + 0_E$, donc $0_E\in F+G$
Soient $z$ et $z'$ dans $F+G$ et $\lambda$ et $\mu$ dans $K$
D'où $x$ et $x'$ dans $F$, $y$ et $y'$ dans G tq $\left\lbrace\begin{array}{l} z = x + y\\ z' = x'+y' \end{array}\right.$
On pose $z'' = \lambda z + \mu z'$. Montrons que $z''\in F+G$ \begin{eqnarray*} z'' &=& \lambda x + \lambda y + \mu x' + \mu y'\\ &=& \underbrace{(\lambda x + \mu x')}_{\in F} + \underbrace{(\lambda y + \mu y')}_{\in G} \hspace{20pt} \text{car }F\text{ et }G\text{ sont stable par combinaison linéaire} \end{eqnarray*} Donc $z''\in F+G$
Ainsi $F+G$ est un sous-espace vectoriel de $E$
2. On a vu que $F$ et $G$ sont dans $F+G$. Donc $F\cup G\subset F+G$. Ainsi $F+G$ est un sous-espace vectoriel de $E$ qui contient $F\cup G$
Donc $\text{vect}(F\cup G)\subset F+G$
Par ailleurs, tout élément de $F+G$ est une combinaison linéaire d'élément de $F\cup G$.
Donc $F+G \subset \text{vect}(F\cup G)$
Donc $F+G = \text{vect}(F\cup G)$ par double inclusion.
8. Donner la définition de la somme directe de deux sous-espaces vectoriels, puis de $n$ sous-espaces vectoriels. Qu'est-ce qu'un supplémentaire d'un sous espace vectoriel ?
Définition :
Soient $E$ un $K$-espace vectoriel, $F$ et $G$ des sous-espaces vectoriels de $E$.On dit que la somme $F+G$ est directe lorsque tout vecteur $z$ de $F+G$ s'écrit de façon unique, $z = x + y$ où $x\in F$ et $y\in G$
La somme est dite directe lorsqu'il y a unicité de l'écriture.
On note alors $F+G = F \oplus G$
Définition :
On dit que la somme $\displaystyle{}\sum_{i=1}^n F_i$ est directe ssi tout vecteur $x$ de $\displaystyle{}\sum_{i=1}^n F_i$ s'écrit de façon unique : $x = x_1 +...+x_n$ où $\forall i\in [\![ 1,n]\!], x_i \in F_i$
Définition :
Soient $E$ un $K$-espace vectoriel et $F$ un sous-espace vectoriel de $E$.On appelle supplémentaire de $F$ dans $E$ tout sous-espace vectoriel $G$ tq $F\oplus G = E$
9. SAVOIR REFAIRE : montrer que deux sous-espace vectoriel $F$ et $G$ sont en somme directe ssi $F\cap G=\{0\}$.
Théorème :
La somme $F+G$ est direct ssi $F\cap G = \{0_E\}$
Preuve :
Supposons que la somme $F+G$ est directe (unicité de l'écriture).Montrons que $F\cap G = \{0_E\}$
$0_E\in F\cap G$ car $F$ et $G$ sont des sous-espaces vectoriel de $E$.
Ils contiennent le vecteur nul.
Montrons que $F\cap G\subset \{0_E\}$
Soit $x\in F\cap G$. Montrons que $x = 0_E$
$x + 0_E = 0_E + x$
Donc, par unicité de l'écriture $\left\lbrace \begin{array}{l} x = 0_E\\ 0_E = x \end{array} \right.$
Donc $x = 0_E$
Réciproquement, on suppose que $F\cap G = 0_E$.
Prouvons l'unicité de l'écriture.
Soit $z\in F+G$ tq $z = f+g$ où $f\in F$ et $g\in G$ et $z = f' + g'$ où $f'\in F$ et $g'\in G$
Montrons que $\left\lbrace \begin{array}{l} f = f'\\ g=g' \end{array} \right.$
On a $f + g = f' + g'$
donc $\underbrace{f-f'}_{\in F} = \underbrace{g'-g}_{\in G}$
donc $f-f'\in F\cap G$ et $g'-g \in F\cap G$
Ainsi $f = f'$ et $g=g'$
D'où le résultat.
10. SAVOIR REFAIRE : soient $E = \mathcal{F}(\mathbb{R},\mathbb{R})$, et $\mathcal{P}\subset E$ est l'ensemble des fonctions paires, $\mathcal{I}\subset E$ celui des fonctions impaires. Montrer que $\mathcal{P}$ et $\mathcal{I}$ sont des sous-espaces vectoriels supplémentaires dans $E$. Donner la décomposition de $\exp$ dans cette somme
1. Montrons que $\mathcal{P}$ et $\mathcal{I}$ sont des sous-espaces vectoriels de $E$.
Montrons que $\mathcal{I}$ est un sous-espace vectoriel de $E$.
$O_E$, la fonction nulle est impaire donc $O_E \in \mathcal{I}$
Soient $f$ et $g$ dans $\mathcal{I}$, $\lambda$ et $\mu$ dans $\mathbb{R}$
On pose $h = \lambda f + \mu g$
Montrons que $h \in \mathcal{I}$, Montrons que $h$ est impaire
Soit $x\in \mathbb{R}$ \begin{eqnarray*} h(-x) &=& \lambda f(-x) + \mu g(-x)\\ &=& -\lambda f(x) - \mu g(x) \hspace{20pt} \text{car } f\text{ et }g \text{ dans }\mathcal{I}\\ &=& -h(x) \end{eqnarray*} Donc $h\in\mathcal{I}$
Donc $\mathcal{I}$ est un sous-espace vectoriel de $E$.
De même pour $\mathcal{P}$
2. Montrons que $E = \mathcal{P}+\mathcal{I}$
$\mathcal{P}+\mathcal{I} \subset E$ (évident)
Montrons que $E \subset \mathcal{P}+\mathcal{I}$
Soit $f\in E = \mathcal{F}(\mathbb{R},\mathbb{R})$
Soit $x\in \mathbb{R}$ $$f(x) = \underbrace{\frac{f(x)+f(-x)}{2}}_{\text{notée }g(x)} + \underbrace{\frac{f(x)-f(-x)}{2}}_{\text{notée }h(x)}$$ $\displaystyle{}g(-x) = \frac{f(-x) + f(x)}{2}$, donc $g$ est paire.
$\displaystyle{}h(-x) = \frac{f(-x) - f(x)}{2} = -h(x)$, donc $h$ est impaire.
Ainsi $f = g+h$ avec $g\in\mathcal{P}$ et $h\in \mathcal{I}$
3. Montrons que $E = \mathcal{P}\oplus \mathcal{I}$
On a $\mathcal{P}+\mathcal{I} = E$. Montrons que la somme est directe. Montrons que $\mathcal{P}\cap\mathcal{I} = \{0_E\}$
Soit $f\in \mathcal{P}\cap \mathcal{I}$. Montrons que $f = 0_E$
$f$ est à la fois paire et impaire par hypothèse.
Soit $x\in\mathbb{R}$, $f(-x) = f(x)$ car $f$ est paire et $f(-x) = -f(x)$ car $f$ est impaire.
Donc $f(x) = -f(x)$ i.e. $2f(x) = 0$, donc $f(x) = 0$
Donc $\forall x\in \mathbb{R}$, $f(x) = 0$ i.e. $f = 0_E$
D'où le résultat.
4. Cas particulier $f = \exp$ \begin{eqnarray*} g(x) &=& \frac{e^x+e^{-x}}{2} = \text{ch}(x) \hspace{20pt} \text{(paire)}\\ \\ h(x) &=& \frac{e^x-e^{-x}}{2} = \text{sh}(x) \hspace{20pt} \text{(impaire)} \end{eqnarray*}
11. Comment prouver que des sous-espaces vectoriels $F$ et $G$ sont des supplémentaires dans $E$ ?
Définition :
Soient $E$ un $k$-espace vectoriel et $F$ un sous-espace vectoriel de $E$.On appelle supplémentaire de $F$ dans $E$ tout sous-espace vectoriel $G$ tq $F \oplus G = E$
12. Soient $E = \Delta^1(\mathbb{R},\mathbb{R}), F = \{f\in E/f(0) = f'(0)\}$ et $G=\text{vect}\{\sin,\cos\}$. Montrer que $F$ et $G$ sont des sous-espaces vectoriels de $E$ et qu'ils sont supplémentaires dans $E$.
1. $G$ est un sous-espace vectoriel car c'est un $\text{vect}$.
$f = 0_E$, la fonction nulle est dérivable et vérifie $f(0) = f'(0) = 0$
Donc $0_F\in F$
Montrons que $f$ est stable par combinaison linéaire.
Soient $f$ et $g$ dans $F$, $\lambda$ et $\mu$ dans $\mathbb{R}$.
On pose $h = \lambda f + \mu g$
On a $h(0) = \lambda f(0) + \mu g(0) = 0+0 = 0$
$h' = (\lambda f + \mu g)' = \lambda f' + \mu g'$
Donc $h'(0) = \lambda f'(0) + \mu g'(0) = 0 + 0 = 0$
Donc $h\in F$
Conclusion : $F$ est un sous-espace vectoriel de $E$.
2.1. Montrons que $F\oplus G = E$. (il faut prouver que $E = F+G$ et que $F\cap G = \{0_E\}$)
Montrons que $F\cap G = \{0_E\}$
Soit $f\in F\cap G$, montrons que $f = 0_E$
$f\in G$, d'où $\lambda$ et $\mu$ réels tq $f = \lambda\sin + \mu\cos$
$f\in F$, donc $\left\lbrace\begin{array}{l} f(0) = 0\\ f'(0) = 0 \end{array}\right.$
$f' = \lambda\cos - \mu\sin$
$f(0) = 0 \Leftrightarrow \lambda\sin(0) + \mu\cos(0) = 0 \Leftrightarrow \mu = 0$
$f'(0) = 0 \Leftrightarrow \lambda\cos(0) - \mu\sin(0) = 0 \Leftrightarrow \lambda = 0$
donc $f$ est nulle ($f = 0_E$)
Donc la somme est directe.
2.2.Montrons que $E = F + G$
L'inclusion $F+G \subset E$ est évidente.
Montrons que $E\subset F+G$
Soit $h\in E$
Il s'agit de trouver $f\in F$ et $g\in G$ tq $h = f+g$
Analyse : si de telles fonctions $f$ et $g$ existent, alors $g = \lambda \sin + \mu \cos$ où $(\lambda, \mu)\in \mathbb{R}^2$
Alors $f = h-g$
$f\in F$ donc $\left\lbrace\begin{array}{l} f(0) = 0\text{ i.e. } h(0)-g(0) = 0\\ f'(0) = 0\text{ i.e. } h'(0)-g'(0) = 0 \end{array}\right.$
Or $g' = \lambda\cos - \mu\sin$
Donc $\left\lbrace\begin{array}{l} f(0) = 0\text{ i.e. } h(0)-g(0) = 0\\ f'(0) = 0\text{ i.e. } h'(0)-g'(0) = 0 \end{array}\right.\Leftrightarrow \left\lbrace\begin{array}{l} h(0) = \lambda\sin(0) + \mu\cos(0)\\ h'(0) = \lambda\cos(0) - \mu\sin(0) \end{array}\right. \Leftrightarrow \left\lbrace\begin{array}{l} \mu = h(0)\\ \lambda = h'(0) \end{array}\right.$
Synthèse :
Soit $h\in E$,
On pose : $g = h'(0)\sin + h(0)\cos$ (ainsi $g\in \text{vect}\{\sin, \cos\}$ i.e. $g\in G$)
$f = h-g$ (ainsi $h = f+g$)
Il reste à vérifier que $f\in F$
$f(0) = h(0)-g(0)$, or $g(0) = h'(0)\sin(0) + h(0)\cos(0) = h(0)$ donc $f(0) = 0$
$f'(0) = h'(0)-g'(0)$, or $g'(0) = h'(0)\cos(0) - h(0)\sin(0) = h'(0)$ donc $f'(0) = 0$
Ainsi $f\in F$
Conclusion : $E\subset F+G$, et donc $E = F+G$
Selon le 2.1., E = $F\oplus G$ i.e. $F$ et $G$ sont supplémentaire dans $E$.
II. Familles.
1. Donner la définition d'une famille (finie) libre/liée. Comment rédige-t-on ?
Définition :
Soient $E$ un $K$-espace vectoriel et $u_1,...,u_p$ des vecteurs de $E$ ($p\in \mathbb{N^*}$).1. On dit que la famille ($u_1,...u_p$) est liée quand il existe une relation de liaison non triviale entre ces vecteur.
$ie$ $\exists \lambda_1,...,\lambda_p \neq 0$ tels que $\lambda_1u_1+...+\lambda_pu_p = 0_E$
2. Dans le cas contraire, la famille est libre.
1. Pour montrer que ($u_1,...,u_p$) est liée, on pose : $\lambda_1,..., \lambda_p$ et on leur donne des valeurs.
On vérifie que $\lambda_1u_1+...+\lambda_pu_p = 0_E$.
2. Pour montrer que ($u_1,...,u_p$) est libre, on prouve que la seule relation possible est la relation triviale.
Soient $\lambda_1,...,\lambda_p$ des scalaires tels que $\lambda_1u_1+...+\lambda_pu_p = 0_E$
Mq $\lambda_1=... =\lambda_p=0_E$
2. Donner la définition d'une famille génératrice.
Définition :
Soient $E$ un $K$-espace vectoriel et $(x_i)_{i\in I}$ une famille de vecteurs de $E$On dit que cette famille est génératrice quand $\text{vect}\lbrace x_i / i\in I \rbrace=E$
i.e. Tout vecteur de $E$ s'écrit comme une combinaison linéaire d'éléments de $(x_i)_{i\in I}$
On dit alors que la famille $(x_i)_{i\in I}$ engendre $E$.
3. Donner la définition d'une famille base. A quoi cela sert-il ?
Définition :
Soient $E$ un K-espace vectoriel et $(x_i)_{i\in I}$ une famille de vecteurs de $E$On dit que cette famille est une famille de base quand elle est à la fois libre et génératrice.
4. Donner les propriétés des sur-familles/sous-familles.
Toute sous famille d'une famille libre est aussi libre.
Toute sur-famille d'une famille liée est aussi liée.
Toute sur-famille d'une famille génératrice est encore génératrice.
Toute sur-famille d'une famille liée est aussi liée.
Toute sur-famille d'une famille génératrice est encore génératrice.
III. Compléments sur les anneaux.
1. Rappeler la définition d'un anneau et d'un corps.
Définition : anneau
Soient $A$ un ensemble, $+$ et $\times$ deux lois internes sur $A$.On dit que $(A,+,\times)$ est un anneau unitaire si :
1. $(A,+)$ est un groupe abélien, on note alors $0=0_A$, l'élément neutre pour la loi $+$
2. $\times$ est associative : $\forall(x,y,z)\in A^3$, $x\times(y\times z) = (x\times y)\times z$
$\times$ admet un élément neutre, noté $1_A$
$\times$ est distributive par rapport à $+$ : $\forall(a, b, c)\in A^3$, $a(b+c) = ab + ac$ et $(b+c)a = ba + ca$
Si la loi $\times$ est commutative on parle alors d'anneau unitaire commutatif.
Définition : corps
Soient $K$ un ensemble, $+$ et $\times$ deux lois internes sur $K$.On dit que $(K,+,\times)$ est un corps si
1. $(K,+,\times)$ est un anneau unitaire
2. Tout élément différent de $0_K$ est inversible i.e. $\mathcal{I}(K) = K^* = K/\{0_K\}$
2. Citer les trois formules du cours valables dans un anneau, et dire à quelle condition.
1. Formule du binôme de Newton dans un anneau unitaire :
$(A,+,\times)$ un anneau unitaire, $(a,b)\in A^2$ et $n\in\mathbb{N}$.
Si $a$ et $b$ commutent i.e. $(a\times b) = (b\times a)$ alors : $$(a+b)^n = \sum_{k=0}^n \left(\begin{array}{c} n\\k \end{array}\right) a^k b^{n-k}$$ NB : par convention $a^0 = 1_A$
2. $a^n-b^n$ :
$(A,+,\times)$ un anneau unitaire, $(a,b)\in A^2$ et $n\in\mathbb{N}$ si $a$ et $b$ commutent i.e. $(a\times b) = (b\times a)$ alors : $$a^n-b^n = (a-b)\times \sum_{k=0}^{n-1}a^kb^{n-1-k}$$ 3. $a^n-1_A$ :
$(A,+,\times)$ un anneau unitaire, $a\in A$ (quelconque) et $n\in\mathbb{N}$ alors : $$a^n-1_A = (a-1_A)(a^{n-1} + a^{n-2}+...+a+1_A)$$
3. Qu'est ce qu'un sous-anneau, un sous-corps ?
Définition : sous-anneau
$(A,+,\times)$ un anneau unitaire, $B\subset A$ est dit sous-anneau de $A$ ssi1. $0_A$ et $1_A$ sont dans $B$
2. $B$ est stable par les lois $+$, $\times$ et par passage à l'opposé (pas l'inverse).
Proposition : Un sous-anneau est un anneau unitaire pour les lois restreintes
Définition : sous-corps
$(K,+,\times)$ un corps, $k\subset K$ est un sous-corps de $K$ ssi1. $0_K$ et $1_K$ sont dans $k$.
2. $k$ est stable par les lois $+$, $\times$, par passage a l'opposé et par passage à l'inverse.
i.e. ssi $k$ est un sous-anneau de $K$ qui est stable par passage à l'inverse : $a\in k \Leftarrow a^{-1} \in k$ $(a \neq 0_K)$
Proposition : Un sous-corps est un corps pour les lois restreintes.
4. Définir $\mathbb{Z}[\sqrt{2}]$ et montrer que c'est un sous-anneau de $\mathbb{R}$.
On définit $\mathbb{Z}[\sqrt{2}]=\{a+b\sqrt{2}/(a,b)\in\mathbb{Z}^2\}$
Montrons que $(\mathbb{Z}[\sqrt{2}], +, \times)$ est un anneau.
Montrons que $(\mathbb{Z}[\sqrt{2}], +, \times)$ est un sous-anneau de $(\mathbb{R}, +, \times)$
1. $0\in \mathbb{Z}[\sqrt{2}]$, car $0 = 0+0\sqrt{2}$
$1\in\mathbb{Z}[\sqrt{2}]$, car $1=1+0\sqrt{2}$
2. $(a+b\sqrt{2})+(a'+b'\sqrt{2}) = (a+a')+(b+b')\sqrt{2}$
$(a+b\sqrt{2})(a'+b'\sqrt{2}) =(aa'+2bb')+(ab'+a'b)\sqrt{2}$
3. $-(a+b\sqrt{2}) = (-a)+(-b\sqrt{2})\in \mathbb{Z}[\sqrt{2}]$
5. Qu'est ce qu'un morphisme de d'anneau ?
Définition :
Soient $(A, +, \times)$ et $(B, +, \times)$ des anneaux unitaires.On dit que $f : (A, +, \times) \to (B, +, \times)$ est un morphisme d'anneau unitaire ssi
$\begin{array}{l|c} \forall(x,y)\in A^2 & f(x+y) = f(x) + f(y)\\ & f(x\times y) = f(x)\times f(y)\\ & f(1_A) = 1_B \end{array}$
IV. Applications linéaires.
1. Donner la définition d'une application linéaire entre deux espaces vectoriels.
Définition :
Soient $E$ et $F$ des $K$-espace vectoriel et $f : E\to F$On dit que $f$ est linéaire lorsque : $$\forall(x,y)\in E^2, \forall(\lambda, \mu)\in K^2, f(\lambda x+\mu y) = \lambda f(x) + \mu f(y)$$ On note alors $f\in \mathcal{L}(E,F)$
1. $\forall(x,y)\in E^2, f(x+y)=f(x)+f(y)$ 2. $\forall\lambda\in K, \forall x\in E, f(\lambda x) = \lambda f(x)$
2. Donner la définition d'un endomorphisme, isomorphisme, d'une forme linéaire, d'un groupe linéaire d'un espace vectoriel et du dual de cet espace vectoriel.
Définition :
- Endomorphisme : Si $E = F$, alors une application linéaire de $E$ dans $E$ (lui même) est appelée un endomorphisme. $\mathcal{L}(E,E)$ est noté $\mathcal{L}(E)$- Isomorphisme : Une application linéaire bijective de $E$ dans $F$ est appelé un isomorphisme. Leur ensemble est noté $\mathcal{I}\text{som}(E,F)$.
Lorsqu'il existe un isomorphisme de $E$ dans $F$ on dit que ces deux $K$-espace vectoriel sont isomorphes. On note alors $E\sim F$ ou encore $E\overset{isom}\sim F$
Ainsi : $E \sim F$ ssi $\mathcal{I}\text{som}(E,F)\neq \emptyset$
- Forme linéaire : Si $E$ un $K$-espace vectoriel, une application linéaire de $E$ dans $K$ est appelé une forme linéaire. L'ensemble des formes linéaires de $E$ est noté $\mathcal{L}(E,K) = E^*$ (ne pas confondre avec $E/\{0_E\}$).
$E^*$ est appelé dual de $E$
- Automorphisme : Une application linéaire et bijective de $E$ dans lui même est appelé un automorphisme (endomorphisme + isomorphisme). L'ensemble des automorphisme de $E$ est noté $\text{GL}(E)$
3. Donner la définition d'un endomorsphime nilpotent et de son ordre de nilpotence.
Définition :
Soient $E$ un $K$-espace vectoriel et $f\in\mathcal{L}(E)$On dit que $f$ est un endomorphisme nilpotent lorsqu'il existe $p\in\mathbb{N}^*$ tq $f^p = 0_{\mathcal{L}(E)}$
Définition : ordre de nilpotence
Si $f\in\mathcal{L}(E)$ est nilpotent, on définit son ordre de nilpotence comme $\overline{\omega}(f) = \min\{k\in\mathbb{N}^*/f^k = 0_{\mathcal{L}(E)}\}$
4. SAVOIR REFAIRE : Soit $f\in \mathcal{L}(E)$ nilpotente d'ordre $p$ et $x_0\in E$ tel que $f^{p-1}(x_0)\neq O_E$. Montrer que la famille ($x_0, f(x_0), ..., f^{p-1}(x_0)$) est libre dans $E$.
Soient $\lambda_0, \lambda_1, ..., \lambda_{p-1}$ des scalaires tq $\lambda_0x_0 + \lambda_1f(x_1)+...+\lambda_{p-1}f(x_0)^{p-1} = 0_E$
Montrons que $\lambda_0 = \lambda_1 = ... = \lambda_{p-1} = 0_K$
On applique $f^{p-1}$
\begin{eqnarray*} f^{p-1}[\lambda_0x_0 + \lambda_1f(x_0)+...+\lambda_{p-1}f(x_0)^{p-1}] &=& f^{p-1}(O_K)\\ \lambda_0f^{p-1}(x_0)+\underbrace{\lambda_1f^{p}(x_0)+...+f^{2p-2}(x_0)}_{\text{nuls car }f^p = 0_{\mathcal{L}(E)}} &=& 0_E \end{eqnarray*} Donc $\forall k\geq p, f^k = 0_E$
Ainsi $\lambda_0\underbrace{f^{p-1}(x_0)}_{\neq O\text{ par hypothèse}} = 0_E$ donc $\lambda_0 = 0_K$
Ainsi $\lambda_1f(x_0)+\lambda_2f(x_0)+...+\lambda_{p-1}f(x_0) = 0_E$
On applique $f^{p-2}$
\begin{eqnarray*} f^{p-1}[\lambda_1f(x_0)+\lambda_2f(x_0)+...+\lambda_{p-1}f(x_0)^{p-1}] &=& f^{p-2}(O_K)\\ \lambda_1f^{p-1}(x_0)+\underbrace{\lambda_2f^{p}(x_0)+...+f^{2p-3}(x_0)}_{\text{nuls car }f^p = 0_{\mathcal{L}(E)}} &=& 0_E \end{eqnarray*} Ainsi $\lambda_1\underbrace{f^{p-1}(x_0)}_{\neq 0_E\text{ par hypothèse}} = 0_E$ donc $\lambda_1 = 0_K$
Donc $\lambda_1f(x_0)+\lambda_2f(x_0)+...+\lambda_{p-1}f(x_0) = 0_E$
En appliquant successivement $f^{p-3}, f^{p-4}, ...$ on obtient par récurrence immédiate : $\lambda_{p-1}\underbrace{f^{p-1}(x_0)}_{\neq 0_E} = 0_E$
Donc $\lambda_{p-1} = 0_K$
Ainsi $\lambda_0 = ... = \lambda_{p-1} = 0_K$
Donc la famille est libre.
5. Donner la définition de l'image et du noyau d'une application linéaire. Que dire de ces ensembles ? Que signifie $x \in \ker(f)$ ? $x\in \text{Im}(f)$ ?
Définition :
Soient $E$ et $F$ des $K$-espace vectoriel et $f\in\mathcal{L}(E,F)$.On appelle noyau de $f$ l'ensemble noté $\ker f\{x\in E/f(x) = 0_E\}$
Ainsi $x\in \ker f$ ssi $f(x) = 0_F$ et $\ker f = f^{-1}(\{0_F\})$
6. SAVOIR REFAIRE : Énoncé et preuve de la caractérisation de l'injectivité d'une application linéaire
Théorème :
1. $\ker f$ est un sous-espace vectoriel de $E$ (la source)$\text{Im} f$ est un sous-espace vectoriel de $F$ (le but)
2. $f$ est injective ssi $\ker f = \{0_E\}$
NB :$f$ est surjective ssi $\text{Im} f = F$
Preuve :
1. $\ker f = f^{-1}(\{0_F\})$ et $\{0_F\}$ est un sous-espace vectoriel de $F$Donc $\ker f$ est un sous-espace vectoriel de $E$.
$\text{Im} f = f(E)$ est l'image directe de $E$ donc c'est un sous-espace vectoriel de $F$
2. On suppose que $f$ est injective.
Montrons que $\ker f = \{0_E\}$
$\{0_E\}\subset \ker f$ car $\ker f$ est un sous-espace vectoriel.
Montrons que $\ker f \subset\{0_E\}$.
Soit $x\in \ker f$ i.e. $f(x) = 0_F$
Or $0_F = f(0_E)$
Donc $f(x) = f(0_E)$ et $f$ étant injective, on a donc $x = 0_E$
Réciproquement, on suppose que $\ker f = \{0_E\}$.
Montrons que $f$ est injective.
Soient $x$ et $y$ dans $E$ tq $f(x) = f(y)$
Montrons que $x=y$
$f(x)-f(y) = 0_F$, donc $f(x-y) = 0_F$ (car $f$ est linéaire)
Ainsi $x-y\in\ker f$
Or $\ker f = \{0_E\}$, donc $x-y = 0_E$ i.e. $x = y$
Ainsi $f$ est injective
7. Recollement : on suppose $E = F \oplus G$. Comment construire une application linéaire de source $E$ ?
Théorème :
Soient $E$ et $V$ des $K$-espace vectoriel, $F$ et $G$ des sous-espaces vectoriels de $E$ supplémentaire i.e. $E = F \oplus G$.Soient $f_1\in\mathcal{L}(F,V)$ et $f_2\in\mathcal{L}(G,V)$
Alors $\exists! f\in \mathcal{L}(E,V)$ tq $\left\lbrace\begin{array}{l}f|_F = f_1\\ f|_G = f_2 \end{array}\right.$
8. On suppose $E = F\oplus G$. Définir la projection sur $F$ parallèlement à $G$. Faire un dessin. Préciser son noyau et son image, et une propriété algébrique remarquable. Qu'appelle-t-on coprojecteur associé ?
Décor : Soient $E$ un $K$-espace vectoriel, $F$ et $G$ des sous-espace vectoriel supplémentaires de $E$ i.e. $E = F\oplus G$
Définition :
On appelle projection sur $F$ parallèlement à $G$ l'unique endomorphisme de $E$, noté $P_{F,G}$ tq $\forall x\in G, P_{F,G}(x) = 0_E$ et $\forall x\in F, P_{F,G}(x) = x$
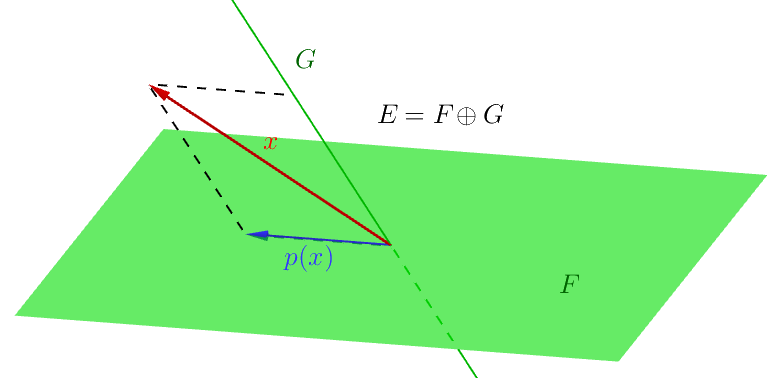
Noyau et image : $\ker(P_{F,G}) = G$ et $\text{Im}(P_{F,G}) = F$
Propriétés algébriques : Si $P = P_{F,G}$, alors $P\circ P = P$ (idempotent)
Définition :
$P_{G,F}$ est appelé la coprojection de $P_{F,G}$, $P_{G,F} = \text{Id}_E - P_{F,G}$
9. Même travail pour la symétrie par rapport à $F$, parallèlement à $G$. Donner une relation avec la projection associée.
Définition :
On appelle symétrie par rapport à $F$ parallèlement à $G$ l'unique endomorphisme de $E$, noté $s_{F,G}$ tq $\forall x\in F, s_{F,G}(x) = x$ et $\forall x\in G, x_{F,G}(x) = -x$
Ainsi $s_{F,G}(x) = x_F-x_G$

Noyau et image : $\ker(s_{F,G}) = \{0_E\}$, $\text{Im}(s_{F,G}) = E$
Propriété algébrique : Si $s = s_{F,G}$, alors $s\circ s=\text{Id}_E$ ($s$ est une involution)
Définition :
$s_{G,F}$ est appelé la cosymétrie de $s_{F,G}$, $s_{G,F} = -s_{F,G}$
10. SAVOIR REFAIRE : soit $p$ un projecteur de l'espace vectoriel $E(p\circ p = p)$. Montrer que $p$ est la projection sur ..., parallèlement à ...
Théorème :
Soit $p\in\mathcal{L}(E)$ tq $P\circ P = P$Alors :
1. $E = \ker P \oplus \text{Im} P$ 2. Si on pose $F = \text{Im} p$ et $G = \ker p$
Alors $E = F\oplus G$ et $P = P|_{F/G}$
Preuve :
On pose $F = \text{Im} P$, $G = \ker P$1. Mq $E = F \oplus G$
Mq $F\cap G = \{0_E\}$
Soit $x\in F\cap G$, mq $x = 0_E$
$x\in F$, d’ou un certain $z\in E$ tq $x = P(z)$
$x\in G$, donc $P(x)=0_E$
Ainsi $P(P(z)) = 0_E$ i.e. $(P\circ P)(z)=0_E$
Or $P\circ P = P$
Donc $P(z) = 0_E$ i.e. $x = 0_E$
D’où la somme directe
Mq $E=F+G$ i.e. mq $E\subset F+G$
Soit $x\in E$. On écrit $x = \underbrace{P(x)}_{\overrightarrow{u}} + \underbrace{x-P(x)}_{\overrightarrow{v}}$
$\overrightarrow{u}\in \text{Im} p = F$
Verifions que $\overrightarrow{v}\in G = \ker(P)$
\begin{eqnarray*} P(v) &=& P(x-P(x))\\ &=& P(x) - P(P(x)) \hspace{20pt}\text{car }P\text{ est linéaire}\\ &=& P(x) - (P\circ P)(x)\\ &=& P(x) - P(x) = 0_E \hspace{20pt}\text{car }P\circ P = P \end{eqnarray*} $\left.\begin{array}{lc} \text{Ainsi } & v\in G\\ & u\in F \end{array}\right\rbrace$ et $x = u + v$
Conclusion : $E = F\oplus G$
2. Mq $P = P_{F/G}$
Il suffit de montrer que ces deux applications linéaires sont égales sur $F$, sur $G$
Soit $x\in E$, on écrit $x = x_F + x_G$ où $x_F\in F$ et $x_G\in G$ $$P(x) = P(x_F)+\underbrace{P(x_G)}_{=0_E\text{ car }x_G\in G = \ker P} \hspace{20pt}\text{car }P\text{ linéaire}$$ Donc $P(x) = P(x_F)$
Or $x_F \in F = \text{Im} P$
D'où un certain $z\in E$ tq $x_F = P(z)$
Donc $P(x_F) = P(P(z)) : (P\circ P)(z) = P(z) = x_F$
Ainsi $P(x) = x_F$
Ainsi $P = P_{F/G}$
11. SAVOIR REFAIRE : soit $s$ une involution de l'espace vectoriel $E(s\circ s = \text{Id})$. Montrer que $s$ est la symétrie par rapport à ..., parallèlement à ...
Théorème :
Soit $s\in\mathcal{L}(E)$ une involution linéaire (i.e. $s\circ s = \text{Id}_E$)On suppose ici que $K = \mathbb{R}, \mathbb{C}$ ou $\mathbb{Q}$
Alors $s$ est une symétrie vectorielle.
Plus précisement, on pose : $F = \ker(s-\text{Id}_E)$ et $G = \ker(s+\text{Id}_E)$
Alors
1. $E = F \oplus G$
2. $s = s_{F/G}$
Preuve :
1. Montrons que $E = F \oplus G$Montrons que $F\cap G = \{0_E\}$
Soit $x\in F\cap G$
On a alors $s(x) = x$ et $s(x) = -x$
Donc $x = -x$ i.e. $2x=0_E$ ($K\subset \mathbb{C}$ donc $2\neq 0_K$)
Donc $x = 0_E$
Montrons que $E=F+G$ i.e. Montrons que $E\subset F+G$
CN : Supposons qu'il existe $u\in F$ et $v\in G$ tq $x = u+v$ $(1)$
Alors $s(u)=u$ et $s(v)=-v$
Donc $s(x) = s(u)+s(v)$ car $s$ est linéaire
Donc $s(x) = u-v$ $(2)$
$(1)+(2) = x+s(x) = 2u$ donne $\displaystyle{}u = \frac{1}{2}(s(x)+x)$
$(1)-(2) = x-s(x) = 2v$ donne $\displaystyle{}v = \frac{1}{2}(x-s(x))$
CS : On pose $\displaystyle{}u = \frac{1}{2}(s(x)+x)$ et $\displaystyle{}v = \frac{1}{2}(x-s(x))$
Ainsi $u+v = x$
Montrons que $u\in F$ i.e. $s(u) = u$
$\displaystyle{}s(u) = s\left[\frac{1}{2}(x+s(x))\right] = \frac{1}{2}\left[s(x)+s(s(x))\right]$ car $s$ est linéaire.
Or $s\circ s = \text{Id}_E$, donc $s(s(x)) : (s\circ s)(x) = x$
Ainsi $s(u) = u$, ainsi $u\in F$
Montrons que $v\in G$ EXO (idem)
Conclusion : $E = F\oplus G$
2. Montrons que $s = s_{F/G}$
Soient $x\in E$, d'où $x_F\in F$ et $x_G \in G$ tq $x = x_F + x_G$
$s_{F/G} = x_F-x_G$
Montrons que $s(x) = x_F+x_G$
Or \begin{eqnarray*} s(x) &=& s(x_f+x_G)\\ &=& s(x_F)+s(x_G) \hspace{20pt}\text{car }s\text{ est linéaire}\\ &=& x_F - x_G \hspace{20pt}\text{car }\forall u\in F, s(u) = u\text{ et }\forall v\in G, s(v) = v \end{eqnarray*} D'où le résultat
12. Que dire de l'image d'une famille libre, liée, génératrice par une application linéaire $f$ (selon les propriétés de $f$) ?
Théorème :
Soient $E$ et $F$ des $K$-espace vectoriel et $f\in\mathcal{L}(E)$Soit $x_{i\in I}$ une famille de vecteurs de $E$. Son image par $f$ est $(f(x_i))_{i\in I}$ (vecteur de $F$).
1. Si $f$ est injective alors l'image d'une famille libre par $f$ est encore libre.
2. Si $f$ est surjective alors l'image d'une famille génératrice par $f$ est encore génératrice.
3. Si $f$ est bijective alors l'image d'une famille base par $f$ est encore base.
4. Dans tous ls cas, l'image d'une famille liée est toujours liée.
13. Caractériser la "-jectivité" d'une application linéaire à l'aide de l'image d'une famille base.
Théorème :
Soient $E$et $F$ des $K$-espace vectoriel et $f\in\mathcal{L}(E,F)$1. $f$ est injective ssi il existe une famille base de $E$ dont l'image par $f$ est une famille libre de $F$.
2. $f$ est surjective ssi il existe une famille base de $E$ dont l'image par $f$ est une famille génératrice de $F$.
3. $f$ est bijective ssi il existe une famille base de $E$ dont l'image par $f$ est une famille base de $F$.
14. SAVOIR REFAIRE : énoncé et preuve du Lemme de Schur. On suppose que $\forall x\in E$, la famille $(x;f(x))$ est liée. Alors $f$ est une homothétie.
lemme : de Schur
$\forall x\in E$, la famille $(x,f(x))$ est liée $\Leftrightarrow$ $f$ est une homothétie.
Preuve :
On suppose que $\forall x\in E$, la famille $(x,f(x))$ est liée. Montrons que $f$ est une homothétie.Si $x$ est un vecteur de $E$ non nul tq $(x,f(x))$ est liée alors il existe $\lambda_x$ tq $f(x) = \lambda_x x$
CP : $x=0$, $f(x) = 0$ donc $f(x) = 0_x$ (c'est encore une homothétie)
Réciproquement, Si pour tout $x\in E$, $\exists \lambda_x\in K$ tq $f(x) = \lambda_x x$ alors $(x,f(x))$ est liée.
Donc $\forall x\in E, (x,f(x))$ liée $\Leftrightarrow$ $\forall x\in E, \exists \lambda_x \in K, f(x) = \lambda_x x$
Le cas où $x\neq 0$, la famille $(x)$ est une base de la droite vectoriel $\text{vect}(x)$ et en particulier $\lambda_x$ est uniquement définit.
Montrons maintenant que $f$ est une homothétie i.e. $\exists \lambda_x\in K, f(x) - \lambda_x x$
Soit $y$ un vecteur de $E$ non nul (fixé) et $x$ un vecteur quelconque.
$1^{\text{er}}$ cas : $(x,y)$ est une famille libre.
On a $f(x+y) = \lambda_{x+y}(x+y)$ mais aussi $f(x+y) = f(x)+f(y) = \lambda_x x + \lambda_y y$ car $f$ est linéaire.
Donc $\lambda_{x+y} = \lambda_x x + \lambda_y y \Leftrightarrow (\lambda_{x+y}-\lambda_x)x+(\lambda_{x+y}-\lambda_y)y = 0$
Or la famille $(x,y)$ est libre donc $\lambda_{x+y}-\lambda_x = 0$ et $\lambda_{x+y}-\lambda_y = 0$
Ainsi $\lambda_x = \lambda_y = \lambda{x+y}$
$2^{\text{nd}}$ cas : la famille $(x,y)$ est liée.
Puisque $y$ est non nul, $\exists \mu\in K, x=\mu y$
Mais alors $f(x) = \mu f(y) = \mu \lambda_y y \Leftrightarrow f(x) = ky$ où $k\in K$
Et $f$ est une homothétie.
La réciproque étant triviale on a prouvé que : $\forall f\in \mathcal{L}(E), f$ est une homothétie $\Leftrightarrow \forall x\in E, (x,f(x))$ est liée